

全国服务热线:
0731-89783591


除泥饼蛇形机器人
产品组成
除泥饼蛇形机器人是一种针对盾构机等设备内泥饼清理的特殊机器人,通常由以下部分组成:1.机械本体;2.驱动系统;3.感知系统;4.清理系统;5.控制系统;6.辅助系统
适用范围
用于盾构机刀盘泥饼的冲刷清理,还可通过机械臂携带的相机检查刀盘状况,具备探伤检验、焊接、切割等 技术集成能力,实现刀盘的多功能检修维保。
产品优势
1.遥控操作三维虚拟仿真平台
2.精准视觉定位与仿真模拟定位
3.EtherCAT工业互联网实现伺服电机联动技术
工作原理
运动原理:
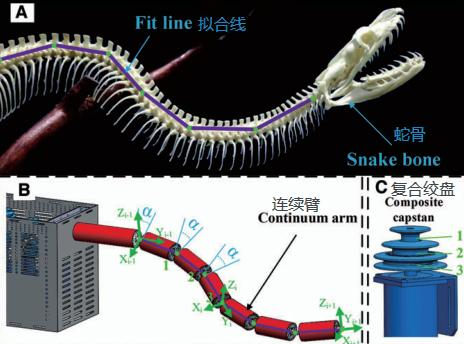
蛇形机器人的设计使其能够在狭小的井壁空间内灵活运动。它由多个关节连接而成,每个关节都有独立的驱 动装置。驱动关节的电机或驱动器按照一定的顺序和力度进行工作,使机器人能够沿着井壁前进、后退、转弯等,从而到达需要清理泥饼的位置。其身体表面有特殊附着装置,增强与井壁之间的摩擦力,防止在运动过程中滑落,确保稳定地在垂直或倾斜的井壁环境中移动。
泥饼去除原理:
机械刮削:机器人身上配备有专门的刮削工具,当机器人在井壁上运动时,刮刀与泥饼表面接触,通过机器人的运动将泥饼从井壁上刮除。
高压水射流清洗:通过高速水流的强大冲击力,将泥饼击碎并冲刷掉。水射流的压力和流量可以根据泥饼的硬度、厚度等特性进行调节。
化学溶解:机器人还可以携带或释放能够溶解泥饼的材料,使泥饼结构变得疏松,更容易被刮削或冲刷掉。
控制与监测原理:
远程控制:操作人员在地面通过有线或无线通信方式对蛇形机器人进行控制。控制指令包括机器人的运动方向、速度,以及除泥饼工具的操作等。
状态监测:机器人自身搭载有各种传感器,用于监测自身的状态和工作环境。
附图


版权所有:福建中天交通工程技术服务有限公司 备案号:闽ICP备16024975号-7
技术支持:福州龙采